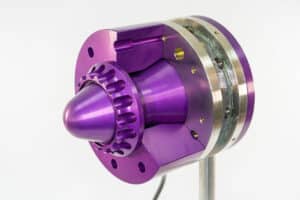
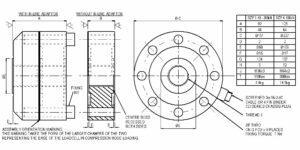
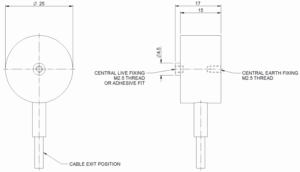
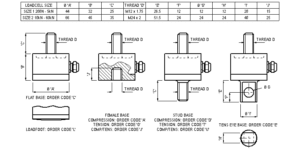
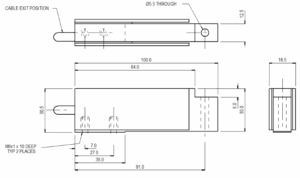
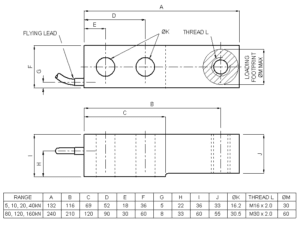
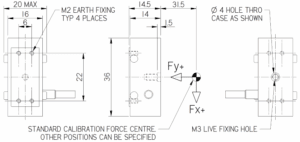
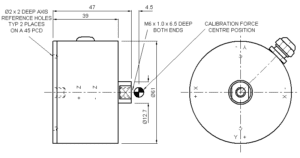
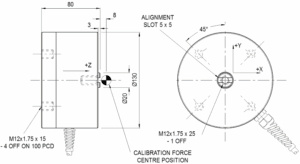
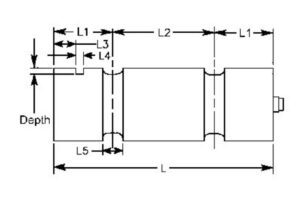
F336 Customer Torque Disc loadcell. Geometry: Low profile torque transducer for use in applications with limited space. Ideal for robotics, animatronics and for use with harmonic drives.
This static torque transducer is designed primarily for requirements with limited space availability or for mass critical systems, making it ideal for applications in the robotics, automotive, aerospace, and medical sectors. However, its excellent overall performance and reliability makes it suitable for a much wider range of OEM and end-user applications.
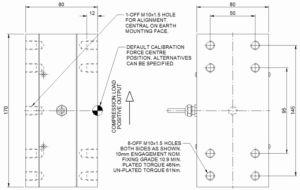
Its robust design ensures accurate data for systems even when subject to significant extraneous forces, such as axial and lateral loads, or moments. When mounted within a rotating joint of a robot arm, for example, the F336 design is effective at resisting the off-axis forces and moments arising from the arm’s self-weight, and additional payload, throughout the full range of movement.
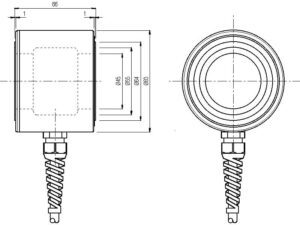
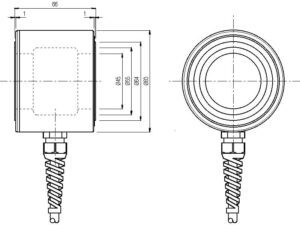
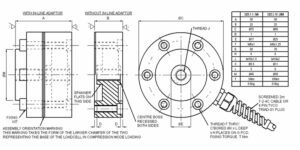
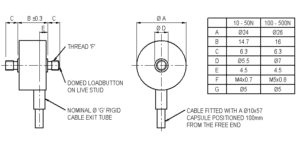
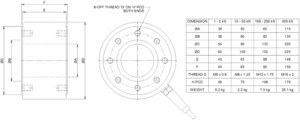
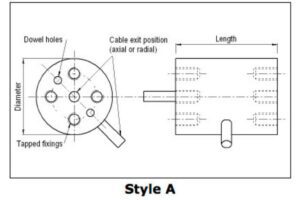
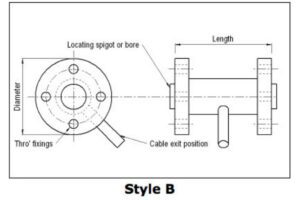
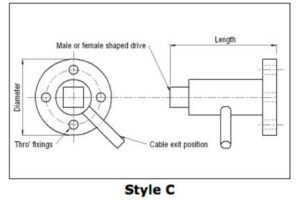
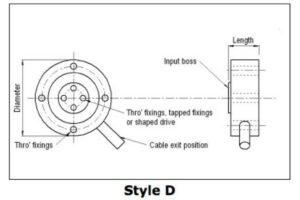
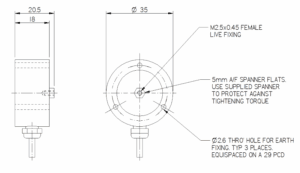
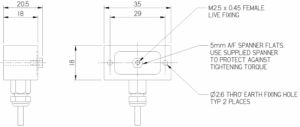
We can offer extensive customisation options to meet your specific needs. Detailed information about load cases and the geometries of surrounding assemblies will be required to accurately determine the resulting extraneous loads. Please consult our engineering department to design a variant tailored to your application, considering factors such as torque range, outer diameter, bore size and overall height, as well as size, position and number of fixings. Variants for operation up to 250°C or use in vacuum environments may be available on request.
Specification
Parameter
Value
Unit
Load range
To be advised by customer
Nm
Non-linearity - Terminal
±0.5
%RL
Hysteresis
±0.5
%RL
Creep
±0.1
%AL
Repeatability
±0.1
%RL
Output Symmetry
±0.5
%AO
Zero load output
±4
%RL
Temperature effect on rate output per °C
±0.005
%AL
Temperature effect on zero load output per °C
±0.005
%RL
Temperature range – Compensated
-10 to +50
°C
Temperature range – Safe
-10 to +80
°C
Excitation voltage - Recommended
10
V
Bridge Resistance
700
Ω
Insulation resistance – Minimum at 50Vdc
500
MΩ
Overload - Safe
50
%RL
Overload - Ultimate
100
%RL
Sealing
IP65
Cable length
2
m
Notes
AL = Applied load
RL = Rated load
Temperature coefficients apply over the compensated range
Exact performance may vary depending on level of customisation
Connections
The torque transducer is fitted with 2 meters of PVC insulated 4 core cable as standard. The cable size may depend on the chosen geometry.
Excitation +ve = Red, Excitation -ve = Blue, Signal +ve = Yellow, Signal -ve = Green, Screen = Orange
Output will be positive in the clockwise direction as standard. Reverse the signal connections to obtain a positive output counter-clockwise if required.